Competencia de Trabajos Estudiantiles
Jurado: Dres. Juan Ignacio Giribet (UBA), Guillermo Steiner (CIII), y Mario Modesti (CIII)
1er Puesto: Diseño conceptual de un sistema de flotabilidad para el control de profundidad de un vehículo robótico subacuático, autores: Germán Hansen, Matías Robador, Fernando Burgos, Claudio D'Ovidio y Claus Smitt
2do Puesto: Estimación de la posición de una plataforma móvil en un ambiente frutícola basado en la detección de troncos con visión estéreo, autores: Sebastián Sansoni, Francisco Raverta Capua y Marcelo L. Moreyra
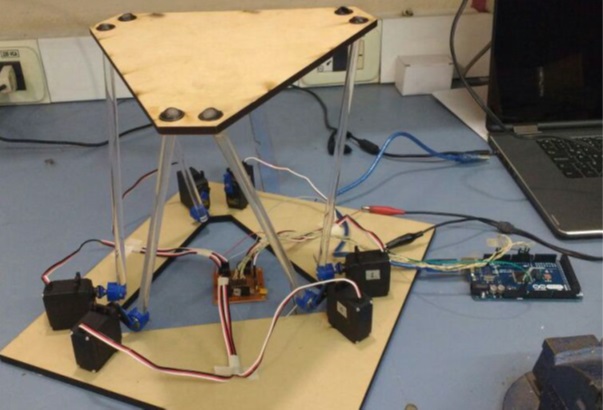
3er Puesto: Diseño e implementación de un modelo cinemático para la plataforma Stewart 6 RUS, autores: Facundo A. Arce Vieyra, Emmanuel Jordán y Bruno Correa
4to Puesto: Robot para limpieza de pisos, autores: Lucas Cukla, Gonzalo Frias, Eduardo Brunner, Lucas Reynoso, Cintia Fit, Brian Scheuermann, Corina M. Feltan y Aldo Caballero

Agradecemos muy especialmente a todos los participantes y al jurado
Exposición de Robots
Jurado: Dres. Guillermo Steiner (CIII), Julio Montesdeoca (INAUT) y Claudio Paz (CIII)
(en orden de mérito otorgado por el jurado)
1er Puesto: Plataforma Stewart 6 RUS, autores: Facundo A. Arce Vieyra, Emmanuel Jordán y Bruno Correa

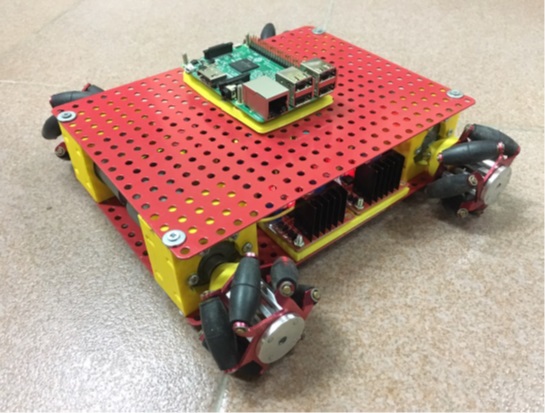
2do Puesto: Implementación de un robot móvil omnidireccional, autores: Andrés E. Rodriguez, Alexis N. Silva, Federico Pinna, Guillermo Larregay, Luis Avila y Daniel Morán

3er Puesto: Control de un robot seguidor de línea con FPGA, autores: Luis J. Vazquez, German Ontivero, Franco Castro, Facundo Vicente y Javier Diaz

4to Puesto: Robot móvil de hardware abierto con fines educativos – EduRoMAA, autores: Edio José Guizzo, Ignacio Torres y Gonzalo Perez-Paina

5to Puesto: Navegación autónoma asistida por cámara externa, autores: Fernando J. Martinez, Fernando Trasobares, Martín Griffa, M. Estefanía Pereyra y Diego Gonzalez Dondo

Competencia de Multicópteros Autónomos
Organizador: Gastón Araguás
(orden de mérito)
1er Puesto: Navegación autónoma mediante odometría visual monocular a bordo de MAVs, autores: Juan J. Tarrio, Claus G. Smitt y Sol Pedre



Cuadricóptero experimental QAAA del CIII, (expuesto, no voló autónomo)
autores: Martin Nievas, Joaquín Miranda, David Gaydou, Gonzalo Perez-Paina, Claudio J. Paz y Martín A. Pucheta

























{kind=link}
